深耕高難度污廢水處理超過(guò)15年,專業(yè)且執(zhí)著!

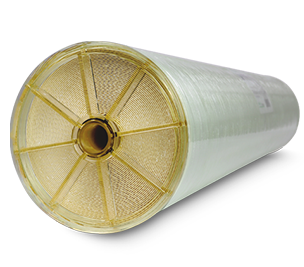
專注特種膜分離技術(shù)的產(chǎn)品開(kāi)發(fā)與應(yīng)用

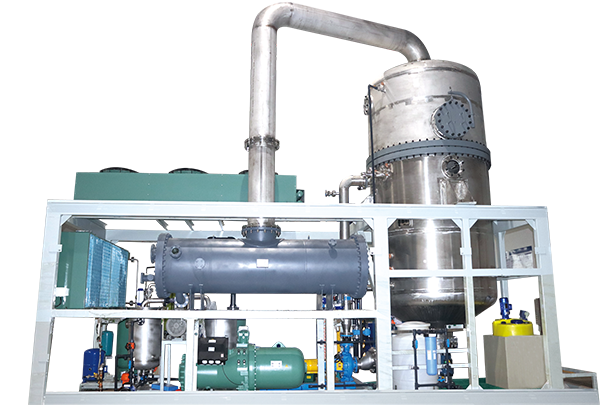
集研發(fā)制造、產(chǎn)品銷售、工程建設(shè)、運(yùn)營(yíng)維護(hù)為一體。
0+m²

工程建設(shè)
項(xiàng)目運(yùn)營(yíng)

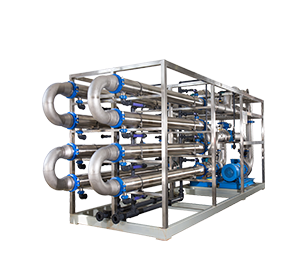
深耕垃圾滲濾液處理領(lǐng)域超過(guò)15年,擁有超過(guò)300個(gè)垃圾滲濾液處理行業(yè)項(xiàng)目案例,是一家專注于膜分離技術(shù)和......
應(yīng)用案例
嘉戎技術(shù)以特種膜分離技術(shù)為核心,在國(guó)內(nèi)外成功實(shí)施了超過(guò)500個(gè)膜處理工程項(xiàng)目,供應(yīng)的DT/ST高壓膜系統(tǒng)......
應(yīng)用案例
嘉戎技術(shù)可為客戶提供填埋場(chǎng)封場(chǎng)及生態(tài)修復(fù)、沼氣收集利用、垃圾開(kāi)挖篩分等服務(wù),并以豐富的經(jīng)驗(yàn)為客戶......
應(yīng)用案例
提供垃圾滲濾液處理、工業(yè)廢水處理等高難度污廢水處理專業(yè)化運(yùn)營(yíng)服務(wù),采取設(shè)備租賃運(yùn)營(yíng)、售后單純運(yùn)營(yíng)......
應(yīng)用案例
提供專業(yè)的尾渣、廢渣填埋運(yùn)營(yíng),還可為客戶提升現(xiàn)有整體方案,解決尾渣進(jìn)場(chǎng)前、中、后期各種潛在問(wèn)題......
應(yīng)用案例
提供滲濾液導(dǎo)排和處理、液位管理、場(chǎng)內(nèi)安全衛(wèi)生管理、人員進(jìn)出管理、堆體穩(wěn)定性檢測(cè)、環(huán)境監(jiān)測(cè)等專業(yè)運(yùn)營(yíng)......
應(yīng)用案例億元總資產(chǎn)累計(jì)
年不懈努力
個(gè)豐富項(xiàng)目案例
億元總資產(chǎn)累計(jì)
年不懈努力
個(gè)豐富項(xiàng)目案例
400 888 0661
0592-6300800
廈門(mén)市同安區(qū)布塘中路1670號(hào)
400 888 7170
hello@jrt-memos.com

關(guān)注嘉戎技術(shù)股份


















 業(yè)務(wù)咨詢:400 888 0661
業(yè)務(wù)咨詢:400 888 0661 售后服務(wù):400 888 7170
售后服務(wù):400 888 7170 前臺(tái)總機(jī):0592-6300800
前臺(tái)總機(jī):0592-6300800